
Chirurgische Assistenzsysteme der Zukunft – „Surgery by wire“
29.10.2012 -
-
 Prof. Dr. Dr. h.c. J. Schipper, Direktor der Univ.-HNO-Klinik Düsseldorf
Prof. Dr. Dr. h.c. J. Schipper, Direktor der Univ.-HNO-Klinik Düsseldorf -
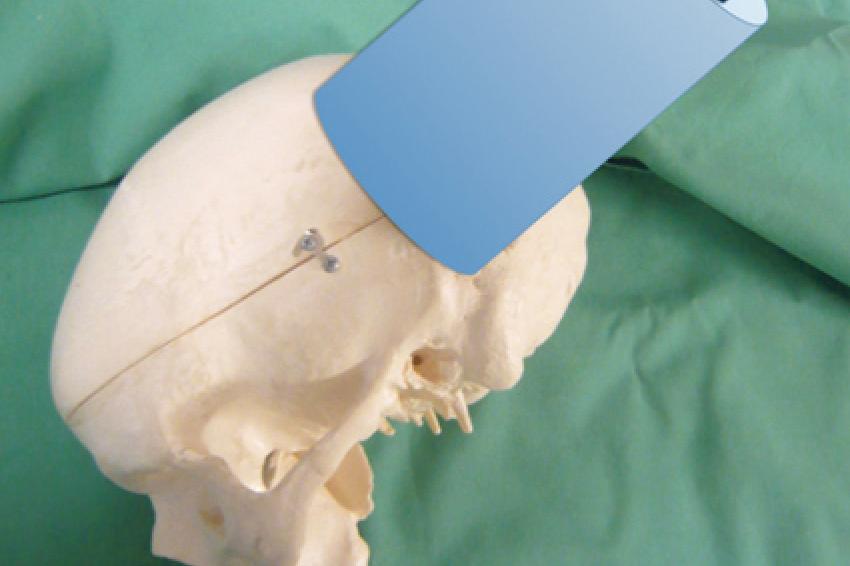 Schematische Darstellung an einem Kunststoffschädel des Menschen angebrachten minimierten chirurgischen Reinraumes mit einem Schleusenaufsatz für die zukünftige gewebeschonende Chirurgie.
Schematische Darstellung an einem Kunststoffschädel des Menschen angebrachten minimierten chirurgischen Reinraumes mit einem Schleusenaufsatz für die zukünftige gewebeschonende Chirurgie.
Ähnlich wie beim Autofahren sollen zukünftig beim operieren Assistenzsysteme die Sicherheit, Präzision und Ergebnisqualität im Operationssaal erhöhen.
Die Assistenzsysteme sollen dabei möglichst unauffällig und wenig wahrnehmbar den Operateur begleiten, sodass seine Konzentration nicht beeinträchtigt wird. Wie im Automobil- und Flugzeugbau bestehen solche Assisenzsysteme aus kabelgeführten Sensoren und/oder Aktuatoren. Sie ermöglichen die permanente Überwachung messphysikalischer Parameter, die sonst den Sinnesorganen des Operteurs nicht zugänglich wären, ohne dabei gleichzeitig zu ermüden. Bei den kabelgeführten Akuatoren wird es sich möglicherweise zukünftig um Konsolen-gesteuerte oder Hand-geführte mechatronische Assistenzsysteme handeln, die auf engstem Raum als Operationsinstrumente chirurgische Aktionen durchführen wie beispielsweise Schneiden, Gewebsablation, Greifen oder Injizieren (sog. Drug-Delivery-Systeme).
Im Gegensatz zu den noch in den 80er oder 90er Jahren projezierten autonomen und halbautonomen wenig platzsparenden chirurgischen Robotersystemen werden nach heutigen Kenntnissen und Maßstäben zukünftig Automaten in Form miniaturisierter mechatronischer Assistenzsysteme den Operateur begleiten, aber nicht ersetzen. Wie beim Fahrzeuglenker oder Pilot bleibt die Entscheidungs- und Handlungskompetenz und damit auch die Verantwortung beim Operateur. Die chirurgischen Assistenzsysteme werden ihn lediglich möglichst unauffällig begleiten, um ihm zu helfen, seine chirurgischen Interventionen noch sicherer und präziser bei konstanter Ergebnisqualität durchzuführen.
Integrierte Sicherheitssysteme
Wie bei allen Automaten, die die körperliche Unversehrtheit des Menschen beeinflussen, bedarf es zusätzlicher integrierter Sicherheitssysteme. Durch die Integration einer zweiten Rückfallebene (Fail-safe-Prinzip) wird sichergestellt, dass bei einem Systemausfall der mechatronischen bzw. sonsorischen Assistenz die Handlungsfähigkeit des Operateurs zur Durchführung des chirurgischen Eingriffs und damit das chirurgisch-therapeutische Ziel nicht nachhaltig beeinträchtigt wird.
Durch die Weiterentwicklung der Sensorik, können heute nicht nur Messparameter wie Haptik, Temperatur, Gefäßströmungseigenschaften, radiologische Gewebsunterschiede, sondern auch bereits biometrisch pathologische Gewebskenngrößen wie Gewebsmalignität oder -benignität in Realtime erfasst werden, beispielsweise durch die Raman-Spektrometrie oder die konfokale Laser-Scanning-Endo-Mikroskopie. So könnte beispielsweise zukünftig der Operateur während der chirurgischen Manipulation bereits erkennen, ob ein Malignom sicher außerhalb der Tumorgrenzen entfernt wurde, und muss nicht auf eine Schnellschnittdiagnostik warten mit unnötiger Verlängerung der Operationszeit.
Schnittstelle Mensch - Maschine
Eine besondere Herausforderung bei der Weiterentwicklung solcher mechatronischen und sensorischen Assistenzsysteme wird die Schnittstelle Mensch - Maschine sein: Wie kann man diese Vielzahl zusätzlicher Informationen dem Operateur zukommen lassen, ohne ihn von seiner eigentlichen chirurgischen Arbeit abzulenken oder ihn zu ermüden, und wie kann der Operateur möglichst fehlerfrei der mechatronischen Assistenz die auszuführenden Aktionen mitteilen? Diese Probleme beschäftigen bereits seit Jahren sowohl die Hersteller von Flugzeugen als auch von Automobilen. Es werden sich jedoch nicht allen Lösungen bei der Cockpitgestaltung im Fahrzeug- und Flugzeugbau auf den Arbeitsplatz des Chirurgen ohne weiteres übertragen lassen.
Die immer weiter gehende Miniaturisierung solcher Systemlösungen für die Sensorik und Mechatronik erlaubt immer kleinere chirurgische Zugangswege für die minimalinvasive Chirurgie (MIC). Hierdurch kann das mögliche Gewebstrauma immer weiter reduziert werden und damit auch mögliche daraus resultierende Funktionsstörungen oder sichtbare Narbenbildungen sowie die Liegezeiten und Krankenhausprozess- und Folgekosten nachhaltig gesenkt werden.
Durch die Miniaturisierung der einzusetzenden chirurgischen Instrumente mit den dazugehörigen sensorischen oder aktuatorischen Systemkomponenten werden die bisherigen über Bowdenzüge oder ähnlich mechanisch gekoppelten Instrumente zugunsten von kabelgeführten Aktuatoren oder Sensoren langfristig ersetzt. Nicht zuletzt wegen möglicher Sterilitätsprobleme werden die Operationsinstrumente der Zukunft eine Kombination von disposible und non-disposible Instrumenten darstellen. Mithilfe der neusten Generation von 3-D-Druckern können mit der „Selective Laser Melting"(SLM)-Technik in kürzester Zeit für den jeweiligen Eingriff die benötigten individualisierte OP-Instrumente („personalized instruments") angefertigt werden.
Durch den Einsatz miniaturisierter Aktuatoren an der Instrumentenspitze ergeben sich zusätzliche Freiheitsgrade für translatorische und rotatorische Gelenke, die durch mechanisch geführte Systeme so vorher nicht möglich waren, um auf engsten Manipulationsraum eine chirurgische Intervention zu realisieren. Diese Instrumente werden zukünftig wenige Tage vor der geplanten Operation als „single-use"-System hergestellt und an eine non-disposible Instrumenten-Plattform gekoppelt, die entsprechend immer wiederverwendet werden kann nach dessen steriler Aufbereitung.
Robotersysteme der Zukunft in einem Operationssaal werden daher möglicherweise vielmehr kleinste Automaten sein in Form mechatronischer oder sensorischer Assistenzsysteme, Hand- oder Konsolen-geführt, als sog. „smart instrumtents", die angelehnt an den Erfahrungen aus dem Automobil- und Flugzeugbau meist unscheinbar und unauffällig den Operateur bei seiner chirurgischen Tätigkeit begleiten.
Miniaturisierung von mechatronischen Aktoren
Die Vorstellung beispielsweise funktionsfähige autoklavierbare Instrumente patientenindividuell aus einem CT-Datensatz automatisch zu konstruieren und innerhalb von wenigen Stunden aus Materialien wie Titan oder anderer Materialen generativ, d. h. ohne klassische Fertigungstechnik und Montage, herzustellen, war noch vor Kurzem undenkbar. Ebenfalls undenkbar war die Miniaturisierung von mechatronischen Aktoren und deren Integration in neuartige chirurgische Instrumente. Hierdurch können zukünftig auch in miniaturisierten Operationsräumen entsprechende chirurgische Manipulationen durchgeführt werden. Ungeheure Fortschritte hat auch die Rechenleistung zur Echtzeitbildverarbeitung von Videobilddaten gemacht, die es jetzt ermöglicht, Endoskopkameras im Inneren von Instrumenten zu platzieren und die Bilddaten integriert auszuwerten. Darüber hinaus können optimierte Verarbeitungsalgorithmen als Bildsignalprozessorhardware kostengünstig hergestellt werden.
Kontakt
Universitätsklinikum Düsseldorf
Moorenstr. 5
40225 Düsseldorf
+49 211 81 00
+49 211 81 4855





